A tiny robot takes off and drunkenly flies several centimeters above a table in the Berkeley Sensor and Actuator Center. Roughly the size and weight of a postage stamp, the microrobot consists of a mechanical structure, propulsion system, motion-tracking sensor and multiple wires that supply power and communication signals.
This flying robot is the project of Daniel Drew, a graduate student who is working under the guidance of electrical engineering and computer sciences professor Kris Pister (M.S.’89, Ph.D.’92 EECS). The culmination of decades of research, these microrobots arose from Pister’s invention of “smart dust,” tiny chips roughly the size of rice grains packed with sensors, microprocessors, wireless radios and batteries. Pister likes to refer to his microrobots as “smart dust with legs.”
“We’re pushing back the boundaries of knowledge in the field of miniaturization, robotic actuators, micro-motors, wireless communication and many other areas,” says Pister. “Where these results will lead us is difficult to predict.”
For now, Pister and his team are aiming to make microrobots that can self-deploy, in the hopes that they could be used by first responders to search for survivors after a disaster, industrial plants to detect chemical leaks or farmers to monitor and tend their crops.
These insect-sized robots come with a unique advantage for solving problems. For example, many farmers already use large drones to monitor and spray their plants to improve crop quality and yield. Microrobots could take this to a whole new level. “A standard quadcopter gives us a bird’s eye view of the field, but a microrobot would give us a bug’s eye view,” Drew says. “We could program them to do important jobs like pollination, looking for the same visual cues on flowers as insects [see].”
But to apply this kind of technology on a mass scale, first the team has to overcome significant challenges in microtechnolgy. And as Pister says, “Making tiny robots that fly, walk or jump hasn’t been easy. Every single piece of it has been hard.”
Flying silently with ion propulsion
Most flying microrobots have flapping wings that mimic real-life insects, like bees. But the team’s flying microrobot, called an ionocraft, uses a custom ion propulsion system unlike anything in nature. There are no moving parts, so it has the potential to be very durable. And it’s completely silent when it flies, so it doesn’t make an annoying buzz like a quadcopter rotor or mosquito.
The ionocraft’s propulsion system is novel, not just a scaled down version from NASA’s spacecrafts. “We use a mechanism that’s different than the one used in space, which ejects ions out the back to propel the spacecraft forward,” Drew says. “A key difference is that we have air on Earth.”
Instead, the ionocraft thruster consists of a thin emitter wire and a collector grid. When a voltage is applied between them, a positively-charged ion cloud is created around the wire. This ion cloud zips toward the negatively-charged collector grid, colliding with neutral air molecules along the way. The air molecules are knocked out of the way, creating a wind that moves the robot.
“If you put your hand under the collector grid of the ionocraft, you’ll feel wind on your hand — that’s the air stream that propels the microrobot upwards,” explains Drew. “It’s similar to the airstream that you’d feel if you put your hand under the rotor blades of a helicopter.”
The collector grid also provides the ionocraft’s mechanical structure. Having components play more than one role is critical for these tiny robots, which need to be compact and lightweight for the propulsion system to work.
Each ionocraft has four ion thrusters that are independently controlled by adjusting their voltages. This allows the team to control the orientation of the microrobot in a similar way as standard quadcopter drones. Namely, they can control the craft’s roll, pitch and yaw. What they can’t do yet is make the microrobot hover. “So far, we can fly it bouncing around like a bug in a web, but the goal is to get it to hover steadily in the air,” Pister says.
Taking first steps and jumps
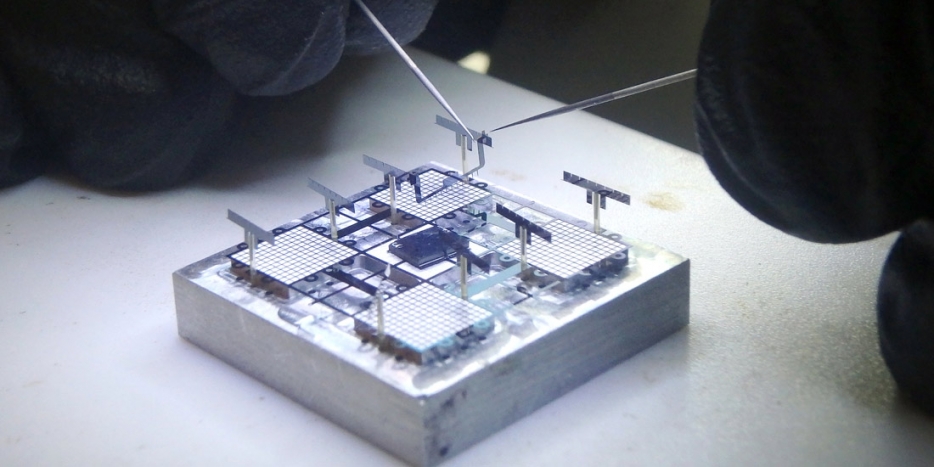
In parallel, the researchers are developing microrobots that can walk or jump. Their micro-walker is composed of three silicon chips: a body chip that plugs perpendicularly into two chips with three legs each. “The hexapod microrobot is about the size of a really big ant, but it’s boxier,” says Pister.
Not only does the body chip provide structural support, but it also routes the external power and control signals to the leg chips. These leg chips are oriented vertically, allowing the legs to move along the table in a sweeping motion. Each leg is driven by two tiny on-chip linear motors, called electrostatic inchworm motors, which were invented by Pister. One motor lifts the robot’s body and the second pushes it forward. This unique walking mechanism allows three-dimensional microrobots to be fabricated more simply and cheaply.
Pister says the design should, in theory, allow the hexapod to run. So far it can only stand up and shuffle forward. However, he believes their recent fabrication and assembly improvements will have the microrobot walking more quickly and smoothly soon.
The jumping microrobot also uses on-chip inchworm motors. Its motor assembly compresses springs to store energy, which is then released when the microrobot jumps. Currently, it can only jump several millimeters in the air, but the team’s goal is to have it to jump six meters from the floor to the table. To achieve this, they are developing more efficient springs and motors.
“Having robots that can shuffle, jump a little and fly is a major achievement,” Pister says. “They are coming together. But they’re all still tethered by wires for control, data and power signals. ”
Working toward autonomy
Currently, high voltage control signals are passed over wires that connect a computer to a robot, complicating and restricting its movement. The team is developing better ways to control the microrobots, untethering them from the external computer. But transferring the controller onto the microrobot itself is challenging. “Small robots can’t carry the same kind of increasingly powerful computer chips that a standard quadcopter drone can carry,” Drew says. “We need to do more with less.”
So the group is designing and testing a single chip platform that will act as the robots’ brains for communication and control. They plan to send control messages to this chip from a cell phone using wireless technology such as Bluetooth. Ultimately, they hope to use only high-level commands, like “go pollinate the pumpkin field,” which the self-mobilizing microrobots can follow.
The team also plans to integrate on-board sensors, including a camera and microphone to act as the robot’s eyes and ears. These sensors will be used for navigation, as well as any tasks they want the robot to perform. “As the microrobot moves around, we could use its camera and microphone to transmit live video to a cell phone,” says Pister. “This could be used for many applications, including search and rescue.”
Using the brain chip interfaced with on-board sensors will allow the team to eliminate most of the troublesome wires. The next step will be to eliminate the power wires so the robots can move freely. Pister showed early on that solar cells are strong enough to power microrobots. In fact, a microrobot prototype that has been sitting on his office shelf for about 15 years still moves using solar power.
Now, his team is developing a power chip with solar cells in collaboration with Jason Stauth (M.S.’06, Ph.D.’08 EECS), who is an associate professor of engineering at Dartmouth. They’re also working with electrical engineering and computer sciences professor Ana Arias to investigate using batteries.
Finally, the researchers are developing clever machine learning algorithms that guide a microrobot’s motion, making it as smooth as possible.
In Drew’s case, the initial algorithms are based on data from flying a small quadcopter drone. “We’re first developing the machine learning platform with a centimeter-scale, off-the-shelf quadcopter,” says Drew. “Since the control system for an ionocraft is similar to a quadcopter, we’ll be able to adapt and apply the algorithms to our ionocraft. Hopefully, we’ll be able to make it hover.”
Putting it all together
Soon, the team hopes to have autonomous microrobots wandering around the lab directed by cell phone messages. But their ambitions don’t stop there. “I think it’s beneficial to have flying robots and walking robots cooperating together,” Drew says. “Flying robots will always consume more energy than walking robots, but they can overcome obstacles and sense the world from a higher vantage point. There is promise to having both or even a mixed-mobility microrobot, like a beetle that can fly or walk.”
Mixed-mobility microrobots could do things like monitor bridges, railways and airplanes. Currently, static sensors are used to monitor infrastructure, but they are difficult and time-consuming to deploy and maintain — picture changing the batteries of 100,000 sensors across a bridge. Mixed-mobility microrobots could also search for survivors after a disaster by flying, crawling and jumping through the debris.
“Imagine you’re a first responder who comes to the base of a collapsed building. Working by flashlight, it’s hard to see much but the dust hanging in the air,” says Drew. “Now, imagine pulling out a hundred insect-sized robots from your pack, tossing them into the air and having them disperse in all directions. Infrared cameras on each robot look for signs of life. When one spots a survivor, it sends a message back to you over a wireless network. Then a swarm of robots glowing like fireflies leads you to the victim’s location, while a group ahead clears out the debris in your path.”
The applications seem almost endless given the microrobots’ potential versatility and affordability. Pister estimates they might cost as little as one dollar someday, using batch manufacturing techniques. The technology is also likely to reach beyond microrobots.
For Pister’s team, the path forward is clear; the open question is when. “All the pieces are on the table now,” Pister says, “and it’s ‘just’ a matter of integration. But system integration is a challenge in its own right, especially with packaging. We may get results in the next six months — or it may take another five years.”
This is a reposting of my news feature previously published in the fall issue of the Berkeley Engineer magazine. © Berkeley Engineering
